MainDrive社 正規代理店
鳴滝工業株式会社
私たち、鳴滝工業では、台湾の信頼性の高いメーカーである「MainDrive社」の波動減速機の取り扱いを開始いたしました。これにより、私たちはロボットや搬送装置などのパワートレイン全体に対応できる製造メーカーとして、より幅広いニーズにお応えすることが可能となります。
波動歯車減速機をより身近に!!
- カスタム品の開発設計試作が可能
- 1個からの製品提供が可能
- 圧倒的なコストパフォーマンスの実現

MAIN DRIVE社について
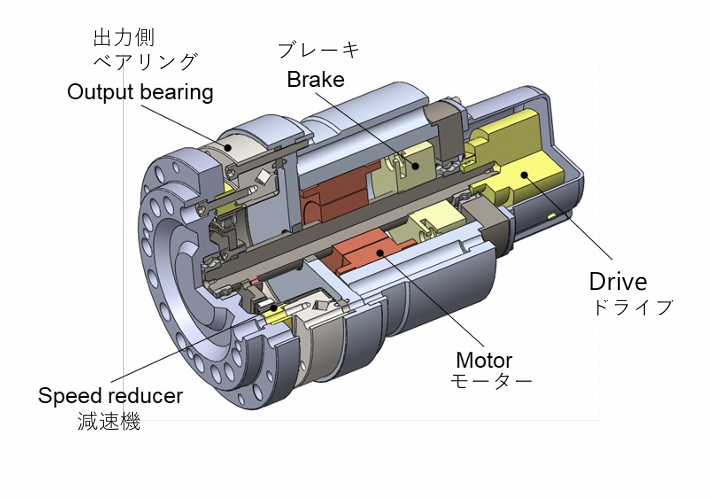
MAIN DRIVE Corporationは2018年10月に設立されました。ロボットジョイントモジュールと波動歯車減速機の生産を専門としています。多関節ロボット・中・低負荷協働ロボット・各種自動化機器。また、重直結合と協力を通じて、電気機械統合・カスタマイズされた設計・波動歯車減速機のインテリジェントな生産という目標に向けて、最も完全なソリューションをお客様に提供しています。
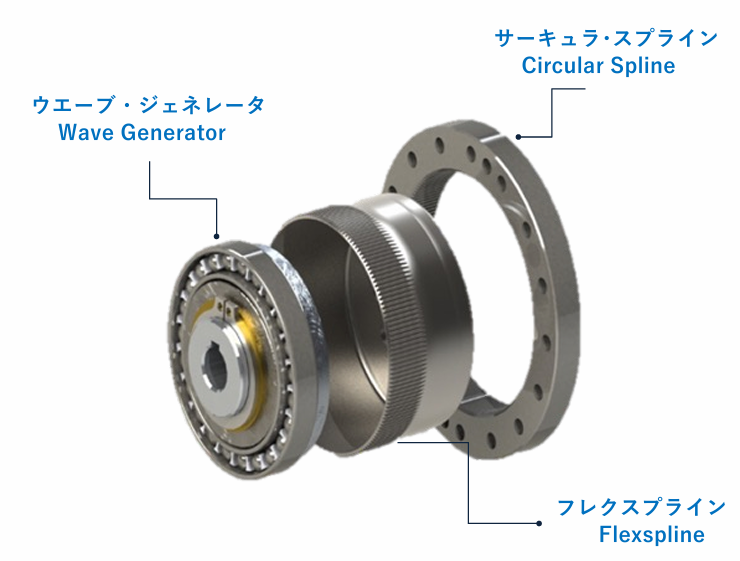
波動歯車減速機とは
波動歯車減速機は、、その高精度・高剛性、低バックラッシ、さらには高効率なトルク伝達特性で知られる減速機の一種です。波動歯車減速機は、入力軸から出力軸へトルクを伝える際、波動歯車と呼ばれる特別な歯車を使って動力を伝達します。この歯車は、歯の接触面積を最大化することによって、滑らかな動作と高い精度を実現します。主にロボットや航空機、精密機器など、高精度な動作が求められる用途に使用されています。
私たちは以下の伝達要素を包括的に取り扱うことができるようになりました。
- 平歯車(スパー、ヘリカル)
- 傘歯車(スパイラル、ゼロール、歯研磨)
- スプライン
- タイミングプーリー
- ラック
- 波動減速機

製品リスト

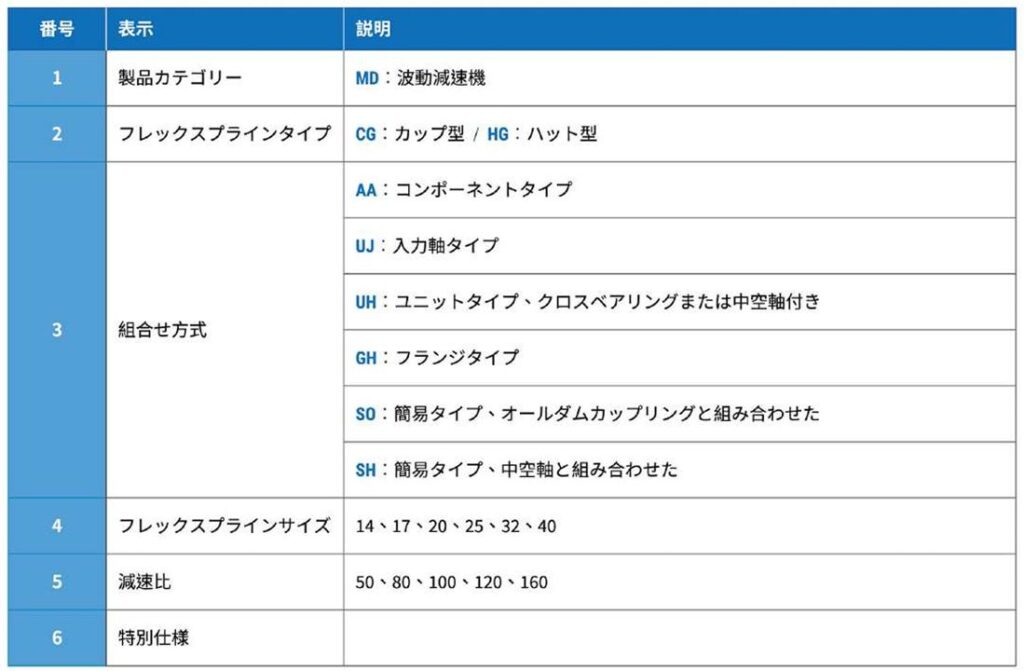
製品コードの識別ルール

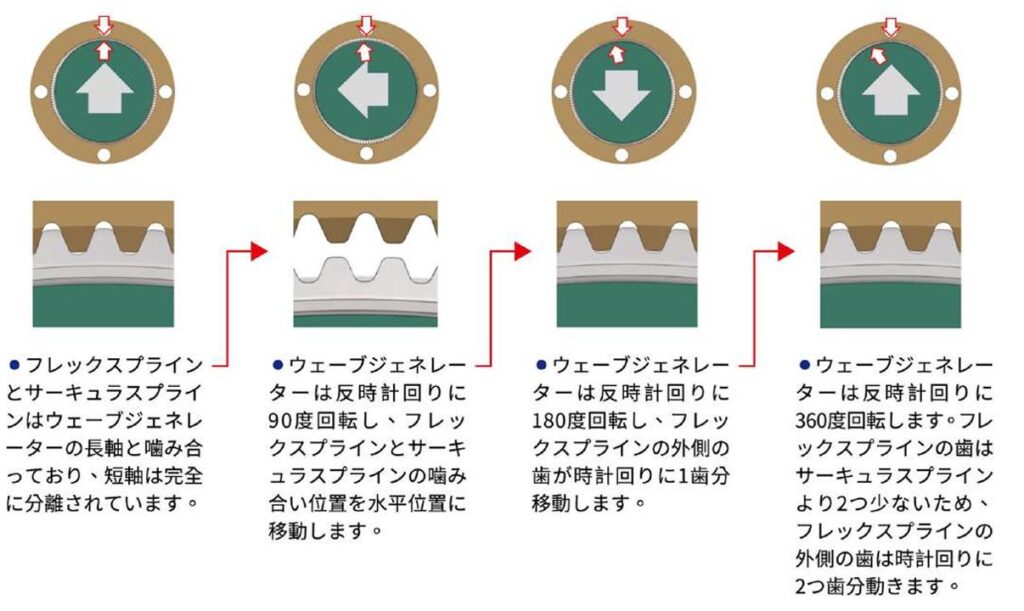
波動歯車減速機の伝達原理
波動歯車減速機の特性データ
伝達誤差
トルクがかかっていないときの実際の出力角度と理論上の出力角度の差。

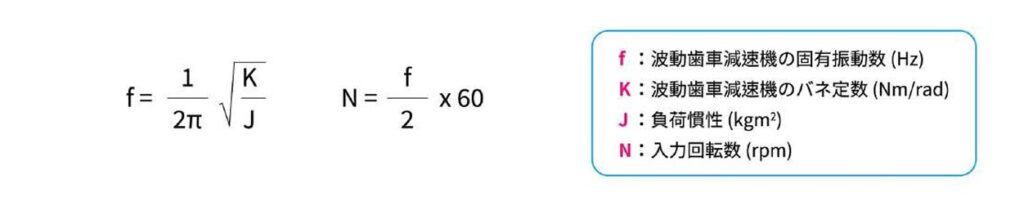
振動
波動歯車減速機の負荷端の振動は、異常な伝達誤差曲線によって引き起こされることが多く、特に波
動歯車減速機の固有振動数がボディまたは慣性回転振動と重なり合って共振効果を生み出し、それが
伝達誤差の振動を増幅します。また、減速機の噛み合い特性により、入力軸が1回転すると2周期の波
動が発生するため、伝達誤差の主な周波数は入力周波数の2倍になります。
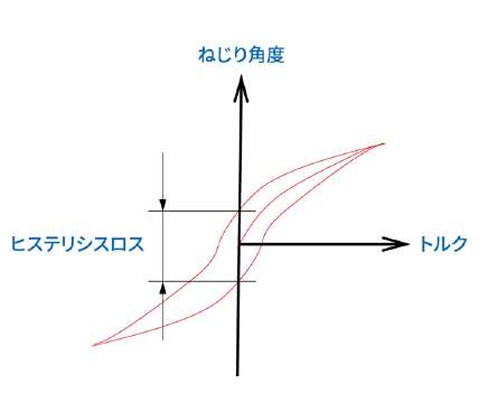
ヒステリシスロス
入力を固定し、出力端のトルクを定格トルクまでそれぞれ正転・逆転させて、ヒステリシス曲線とねじり角軸の切片差を求めます。

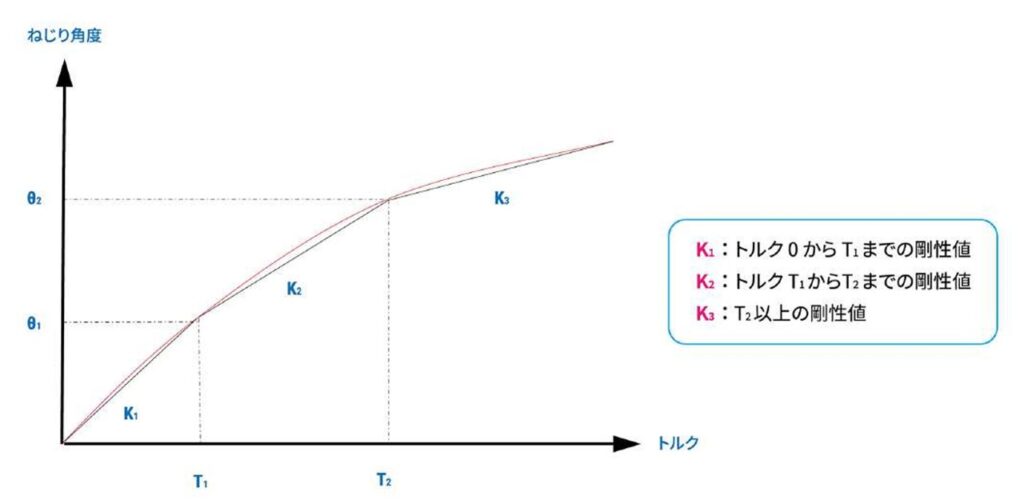
剛性
入力側は固定されており、出力側に加えられるトルクに基づいて剛性とねじれ角度が計算されます。
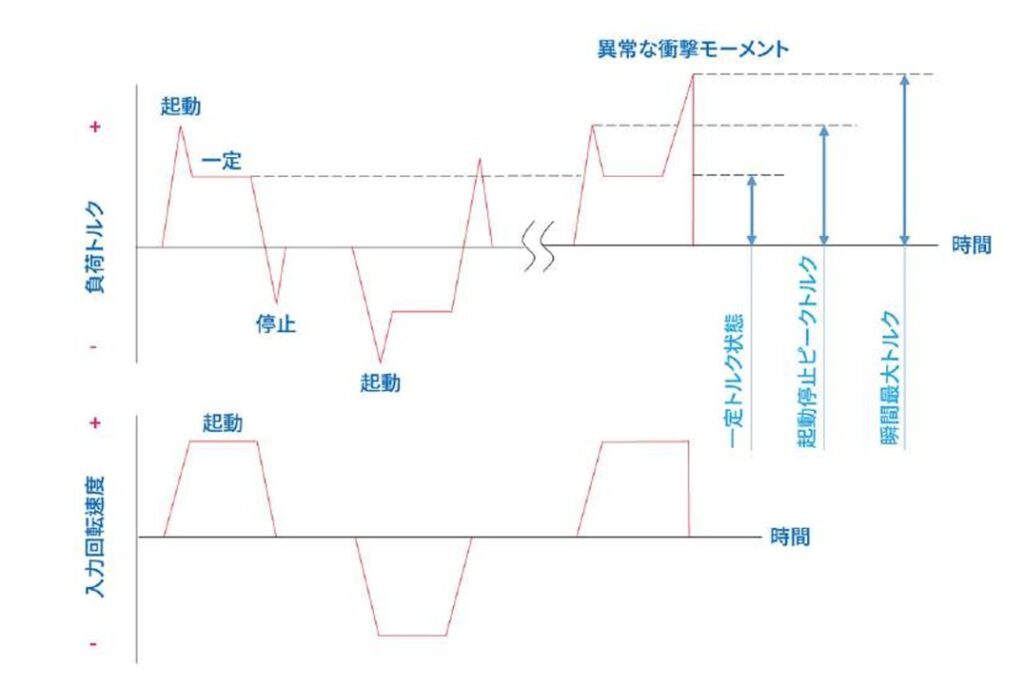
起動・停止許容ピークトルク
起動時および停止時には、慣性により一定のトルクよりも大きなトルクが発生します。
- 定格出力トルク
入力速度2000rpm時の許容連続負荷トルク。 - 起動トルク
無負荷状態で入力端を回転させ、回転し始めるトルク値を測定します(周囲温度:25℃)。 - 無負荷運転トルク
波動歯車減速機が無負荷 (周囲温度25℃) で定格回転速度で回転するために必要な入力トルク値。 - 增速起動トルク
出力端からトルクを加えたときに入力端が回転を始めるのに必要なトルク値(周囲温度:25°C)。 - 最大許容入力速度、平均許容入力速度
減速機の入力速度は仕様表に規定された許容値を超えてはなりません。 - 騷音值
測定は、定格速度で無負荷の状態で、波動歯車減速機から1mの距離で実行されます。 - 效率
定格負荷および定格速度で測定された効率値。
今後も私たちは、MainDrive社の波動減速機を活用し、お客様のパワートレイン設計における幅広いニーズにお応えしていきます。また、全国各地の展示会にも出展し、実際に製品をご覧いただける機会を提供しています。
ロボット・AMRや
オートメーション分野に最適
MAIN DRIVE社の品質管理システム

MAIN DRIVE社 カタログダウンロードはこちら
波動歯車減速機の基礎知識
失敗しない減速機の仕様選定方法
【1】🔍 用途と要求仕様の明確化
まず、以下のような使用条件を整理します。
| 項目 | 内容の例 |
|---|---|
| 駆動対象 | ロボット、搬送機器、ポンプなど |
| 必要出力 | トルク(Nm)、出力(kW) |
| 使用環境 | 室内、屋外、粉塵・水分、温度 |
| 精度要求 | バックラッシ、繰返し精度など |
| 回転速度 | 出力側の希望rpm、応答性など |
| 使用時間 | 常時・間欠・サイクル数(寿命に関係) |
【2】⚙️ 必要減速比の計算
以下の式で、おおまかな減速比(i)を求めます。
減速比 = モーター回転速度 ÷ 出力軸回転速度
例:モーター3000rpmで出力側を100rpmにしたい場合
→ 減速比 = 3000 ÷ 100 = 30
【3】🧮 出力トルクの計算
トルク(Nm)は、以下の式で求められます:
T = 9550 × 出力(kW) ÷ 出力軸回転速度(rpm)
さらに、減速機の**安全率(通常1.5〜2.5)**を考慮し、選定トルクを計算します:
選定トルク = 使用トルク × 安全率
【4】🏗️ 減速機タイプの選定
使用目的に応じて、適切な種類を選びます:
| タイプ | 特長 | 用途例 |
|---|---|---|
| 波動歯車減速機 | 高精度・小型・ゼロバックラッシ | ロボット、精密制御 |
| 遊星歯車減速機 | 耐久性・高効率・コスト良 | 一般産業、搬送機器 |
| サイクロイド/トロコイド | 高トルク・衝撃耐性 | コンベア、重負荷機器 |
【5】📏 フランジ・軸径・寸法などの機械接続条件確認
- 出力軸径(キーあり/キーなし、中空/中実)
- 取付け形状(フランジ、脚取付けなど)
- モーターとの組合せ(直結、ベルト駆動など)
- 許容ラジアル荷重・スラスト荷重
💡 選定時のヒント
| ポイント | アドバイス |
|---|---|
| 安全率 | 不意の過負荷を見越して選定する(最低1.5倍) |
| 高速回転用途 | 波動歯車より遊星ギアの方が適している場合も |
| 精度重視 | バックラッシの数値を確認(波動ギアは最小) |
| 小型軽量化 | 波動歯車やトロコイドが有利なケースが多い |